Penalti dalam Program Linier: Mengoptimalkan Solusi dengan Mengakomodasi Pelanggaran Kendala
Table of Content
Penalti dalam Program Linier: Mengoptimalkan Solusi dengan Mengakomodasi Pelanggaran Kendala
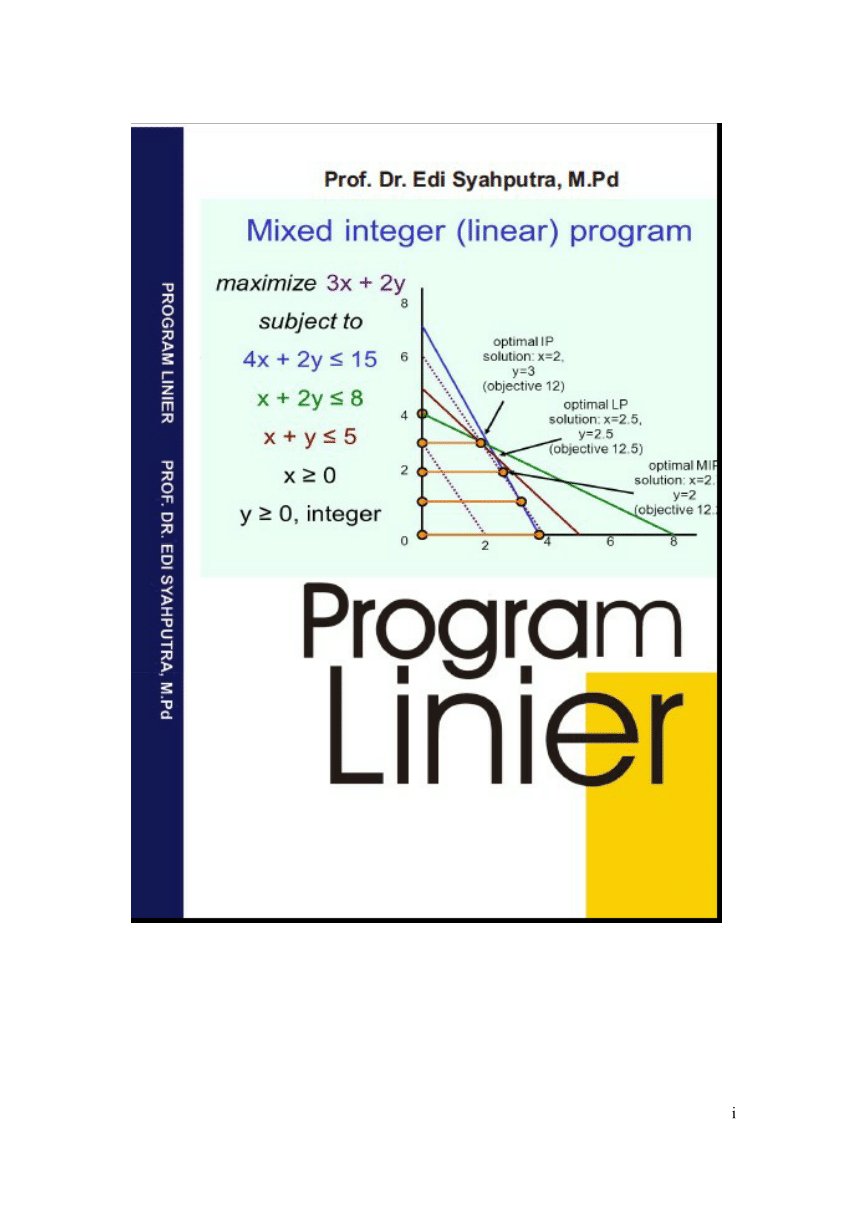
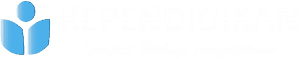
Program linier (PL) merupakan teknik optimasi matematis yang digunakan untuk menemukan solusi terbaik (maksimal atau minimal) dari suatu fungsi objektif, dengan memperhatikan sejumlah kendala yang dinyatakan dalam bentuk persamaan atau pertidaksamaan linier. Dalam realitasnya, menemukan solusi yang sepenuhnya memenuhi semua kendala terkadang sulit, bahkan mustahil. Kendala mungkin merepresentasikan keterbatasan sumber daya, kapasitas produksi, atau regulasi yang kaku. Situasi ini melahirkan konsep "penalti" dalam program linier. Penalti merupakan mekanisme yang memungkinkan solusi yang melanggar kendala tetap dipertimbangkan, namun dengan konsekuensi berupa penurunan nilai fungsi objektif. Penerapan penalti memungkinkan fleksibilitas dan realisme yang lebih tinggi dalam model PL, menghasilkan solusi yang lebih praktis dan relevan dengan kondisi dunia nyata.
Artikel ini akan membahas secara mendalam arti kata penalti dalam konteks program linier, mempertimbangkan berbagai pendekatan penalti, kelebihan dan kekurangannya, serta aplikasi praktis dalam berbagai bidang.
Konsep Dasar Penalti dalam Program Linier
Penalti dalam program linier merupakan sebuah metode untuk menangani kendala yang mungkin dilanggar. Alih-alih mengabaikan solusi yang tidak memenuhi semua kendala (yang seringkali menghasilkan solusi yang tidak feasible atau tidak mungkin dicapai), pendekatan penalti menambahkan sebuah fungsi penalti ke dalam fungsi objektif. Fungsi penalti ini memberikan hukuman (penalti) proporsional terhadap besarnya pelanggaran kendala. Dengan demikian, solusi yang melanggar kendala tetap dipertimbangkan, tetapi nilainya akan dikurangi sesuai dengan tingkat pelanggarannya.
Secara matematis, jika fungsi objektif asli adalah Z dan terdapat kendala g(x) ≤ 0 yang dilanggar, maka fungsi objektif yang dimodifikasi dengan penalti menjadi:
Z’ = Z + P(g(x))
di mana:
- Z’ adalah fungsi objektif yang dimodifikasi dengan penalti.
- Z adalah fungsi objektif asli.
- P(g(x)) adalah fungsi penalti yang bergantung pada besarnya pelanggaran kendala g(x).
Fungsi penalti P(g(x)) dapat berbentuk berbagai macam, tergantung pada strategi penalti yang dipilih. Pemilihan fungsi penalti yang tepat sangat krusial karena akan mempengaruhi kualitas solusi yang diperoleh.
Jenis-jenis Fungsi Penalti
Beberapa jenis fungsi penalti yang umum digunakan dalam program linier meliputi:
-
Penalti Linier: Fungsi penalti ini berbentuk linier terhadap besarnya pelanggaran kendala. Misalnya, jika g(x) > 0 (pelanggaran kendala), maka P(g(x)) = c * g(x), di mana c adalah konstanta yang merepresentasikan besarnya penalti per unit pelanggaran. Keuntungan penalti linier adalah kesederhanaannya, namun kekurangannya adalah kurang sensitif terhadap besarnya pelanggaran. Pelanggaran kecil dan besar akan dikenai penalti yang berbeda secara proporsional, tetapi mungkin tidak cukup mencerminkan dampak sebenarnya dari pelanggaran tersebut.

Penalti Kuadratik: Fungsi penalti ini berbentuk kuadratik terhadap besarnya pelanggaran kendala. Misalnya, P(g(x)) = c * (g(x))^2. Penalti kuadratik memberikan penalti yang lebih besar untuk pelanggaran yang lebih besar, sehingga lebih sensitif terhadap tingkat pelanggaran. Hal ini dapat menghasilkan solusi yang lebih akurat dan lebih dekat dengan solusi yang feasible. Namun, kompleksitas perhitungannya lebih tinggi dibandingkan penalti linier.
-
Penalti Eksponensial: Fungsi penalti ini berbentuk eksponensial terhadap besarnya pelanggaran kendala. Misalnya, P(g(x)) = c exp(k g(x)), di mana c dan k adalah konstanta. Penalti eksponensial memberikan penalti yang sangat besar untuk pelanggaran yang signifikan, sehingga solusi yang melanggar kendala secara signifikan akan dihindari. Namun, fungsi ini dapat menyebabkan kesulitan numerik dalam proses optimasi.
-
Penalti Logaritmik: Fungsi penalti logaritmik, seperti P(g(x)) = -c * ln(1 – g(x)), memberikan penalti yang semakin besar seiring mendekati batas kendala (g(x) mendekati 0). Fungsi ini berguna untuk menghindari pelanggaran kendala yang terlalu dekat dengan batasnya.
Pemilihan jenis fungsi penalti bergantung pada karakteristik masalah dan preferensi pemodel. Perlu dilakukan eksperimen dan analisis sensitivitas untuk menentukan fungsi penalti yang paling tepat.
Metode Penalti dalam Program Linier
Terdapat dua metode utama penerapan penalti dalam program linier:
-
Metode Penalti Eksternal: Metode ini menambahkan fungsi penalti ke dalam fungsi objektif tanpa mengubah kendala asli. Solusi yang diperoleh mungkin melanggar kendala, tetapi penalti akan mengurangi nilai fungsi objektif sesuai dengan tingkat pelanggaran. Metode ini relatif mudah diimplementasikan, tetapi pemilihan parameter penalti (konstanta c dalam contoh di atas) sangat penting untuk mendapatkan solusi yang memuaskan. Nilai c yang terlalu kecil mungkin menghasilkan solusi yang jauh dari solusi feasible, sedangkan nilai c yang terlalu besar dapat menyebabkan kesulitan numerik.
-
Metode Penalti Internal: Metode ini mengubah kendala asli dengan menambahkan variabel slack (variabel tambahan yang merepresentasikan besarnya pelanggaran) dan menambahkan fungsi penalti yang bergantung pada variabel slack tersebut ke dalam fungsi objektif. Metode ini cenderung menghasilkan solusi yang lebih dekat ke solusi feasible dibandingkan metode penalti eksternal. Namun, kompleksitas model akan meningkat karena penambahan variabel slack.
Kelebihan dan Kekurangan Metode Penalti
Kelebihan:
- Fleksibel: Memungkinkan pertimbangan solusi yang melanggar kendala, yang lebih realistis dalam banyak aplikasi dunia nyata.
- Sederhana (untuk penalti linier): Implementasi metode penalti linier relatif sederhana.
- Mudah dipahami: Konsep penalti relatif mudah dipahami dan diinterpretasikan.
Kekurangan:
- Pemilihan parameter penalti: Pemilihan parameter penalti (misalnya, konstanta c) dapat berpengaruh signifikan terhadap kualitas solusi. Penentuan parameter yang optimal seringkali memerlukan eksperimen dan analisis sensitivitas.
- Kemungkinan solusi tidak feasible: Meskipun solusi yang diperoleh dapat mendekati solusi feasible, solusi tersebut mungkin masih melanggar kendala, meskipun dengan tingkat pelanggaran yang kecil.
- Kompleksitas perhitungan (untuk penalti non-linier): Metode penalti non-linier (kuadratik, eksponensial) dapat meningkatkan kompleksitas perhitungan, terutama untuk masalah berdimensi tinggi.
Aplikasi Praktis Metode Penalti
Metode penalti memiliki berbagai aplikasi praktis dalam berbagai bidang, antara lain:
-
Perencanaan Produksi: Dalam perencanaan produksi, kendala mungkin meliputi keterbatasan kapasitas mesin, ketersediaan bahan baku, dan permintaan pasar. Metode penalti dapat digunakan untuk menemukan rencana produksi yang optimal meskipun terdapat sedikit pelanggaran kendala.
-
Pengelolaan Portofolio Investasi: Dalam pengelolaan portofolio investasi, kendala mungkin meliputi batasan risiko, diversifikasi aset, dan target return. Metode penalti dapat digunakan untuk menemukan portofolio investasi yang optimal meskipun terdapat sedikit pelanggaran kendala.
-
Perencanaan Transportasi: Dalam perencanaan transportasi, kendala mungkin meliputi kapasitas jalan, waktu tempuh, dan ketersediaan kendaraan. Metode penalti dapat digunakan untuk menemukan rute transportasi yang optimal meskipun terdapat sedikit pelanggaran kendala.
-
Perancangan Struktur: Dalam perancangan struktur, kendala mungkin meliputi kekuatan material, beban maksimum, dan stabilitas struktur. Metode penalti dapat digunakan untuk menemukan desain struktur yang optimal meskipun terdapat sedikit pelanggaran kendala.
Kesimpulan
Penalti dalam program linier merupakan teknik yang powerful untuk menangani kendala yang mungkin dilanggar. Dengan menambahkan fungsi penalti ke dalam fungsi objektif, metode penalti memungkinkan pertimbangan solusi yang tidak sepenuhnya memenuhi semua kendala, menghasilkan solusi yang lebih realistis dan praktis. Pemilihan jenis fungsi penalti dan metode penalti yang tepat sangat penting untuk mendapatkan solusi yang berkualitas. Meskipun terdapat beberapa kekurangan, seperti kesulitan dalam pemilihan parameter penalti dan kemungkinan solusi tidak feasible, metode penalti tetap menjadi alat yang berharga dalam menyelesaikan masalah optimasi di berbagai bidang. Pemahaman yang mendalam tentang konsep penalti dan penerapannya sangat penting bagi praktisi yang bekerja dengan program linier untuk mendapatkan solusi yang optimal dan relevan dengan kondisi dunia nyata.